
Tìm hiểu về hệ thống theo dõi điểm mù (BSM)
Tìm hiểu về hệ thống theo dõi điểm mù (BSM)
Nội dung:
1. Tổng quan
2. Vị trí các chi tiết
3. Sơ đồ hệ thống
4. Nguyên lý hoạt động
5. Các lưu ý khi sửa chữa
1. Tổng quan
- Hệ thống theo dõi điểm mù (BSM) sử dụng cùng các cảm biến để thực hiện 2 chức năng: Chức năng theo dõi điểm mù (BSM) và Chức năng cảnh báo xe chạy ngang phía sau (RCTA)
- Chức năng BSM và chức năng RCTA có thể được bật/tắt trên màn hình đa thông tin.
- Chức năng theo dõi điểm mù phát hiện các xe di chuyển trong vùng điểm mù của xe, giúp người lái xác nhận sự an toàn khi chuyển làn.
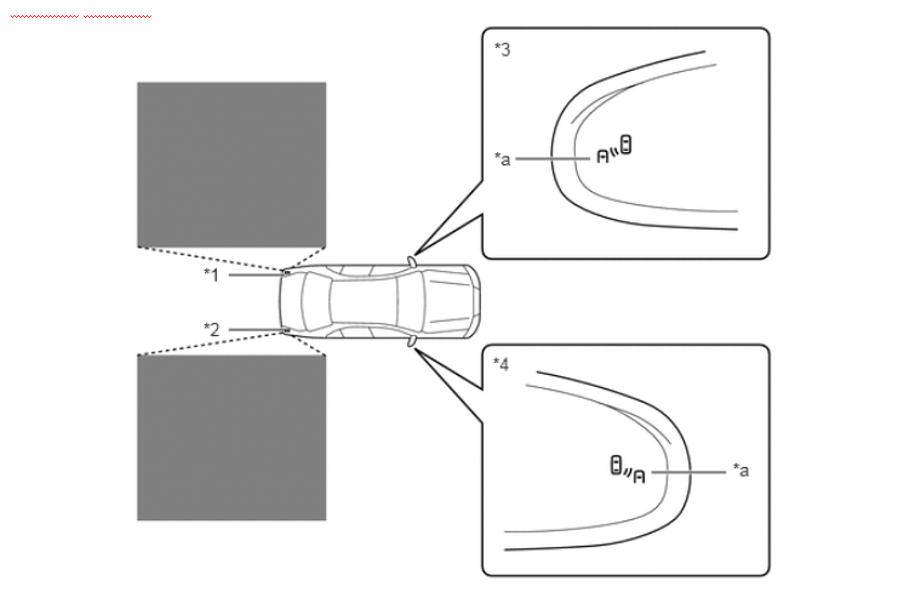
- Tùy thuộc vào trạng thái hoạt động, chức năng theo dõi điểm mù nâng cao việc xác nhận an toàn của người lái bằng cách sử dụng đèn chỉ báo trên cụm gương chiếu hậu bên ngoài để cảnh báo cho người lái biết rằng có xe khác đang xâm nhập vào vùng phát hiện điểm mù của xe mình.
- Đèn chỉ báo trên gương chiếu hậu thông báo cho người lái rằng có một xe khác đang nằm trong vùng phát hiện điểm mù bằng cách sáng lên khi đang không bật công tắc đèn báo rẽ và bằng cách nháy sáng khi đang bật công tắc đèn báo rẽ.
- Chức năng cảnh báo xe chạy ngang phía sau (RCTA) giúp phát hiện các xe khác ở phía sau xe trong khu vực phát hiện khi đang lùi và cảnh báo cho người lái bằng chuông báo RCTA và nháy đèn chỉ báo trên gương chiếu hậu bên ngoài, cung cấp thêm thông tin hỗ trợ người lái lùi xe an toàn.
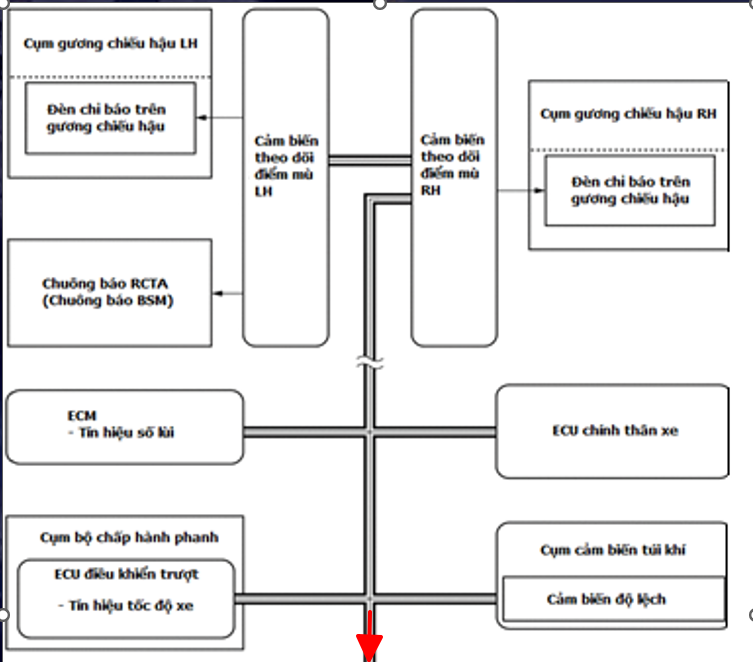
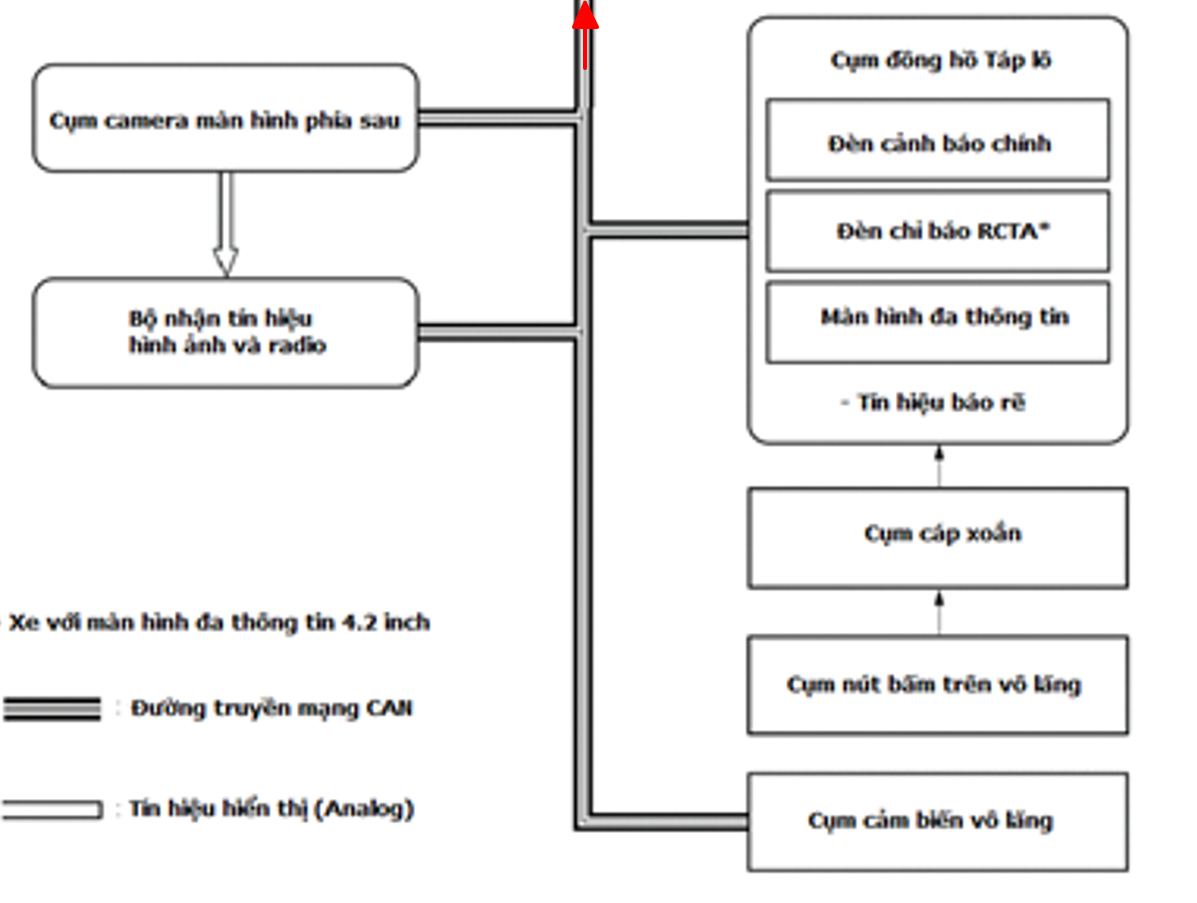
2. Sơ đồ hệ thống theo dõi điểm mù BSM
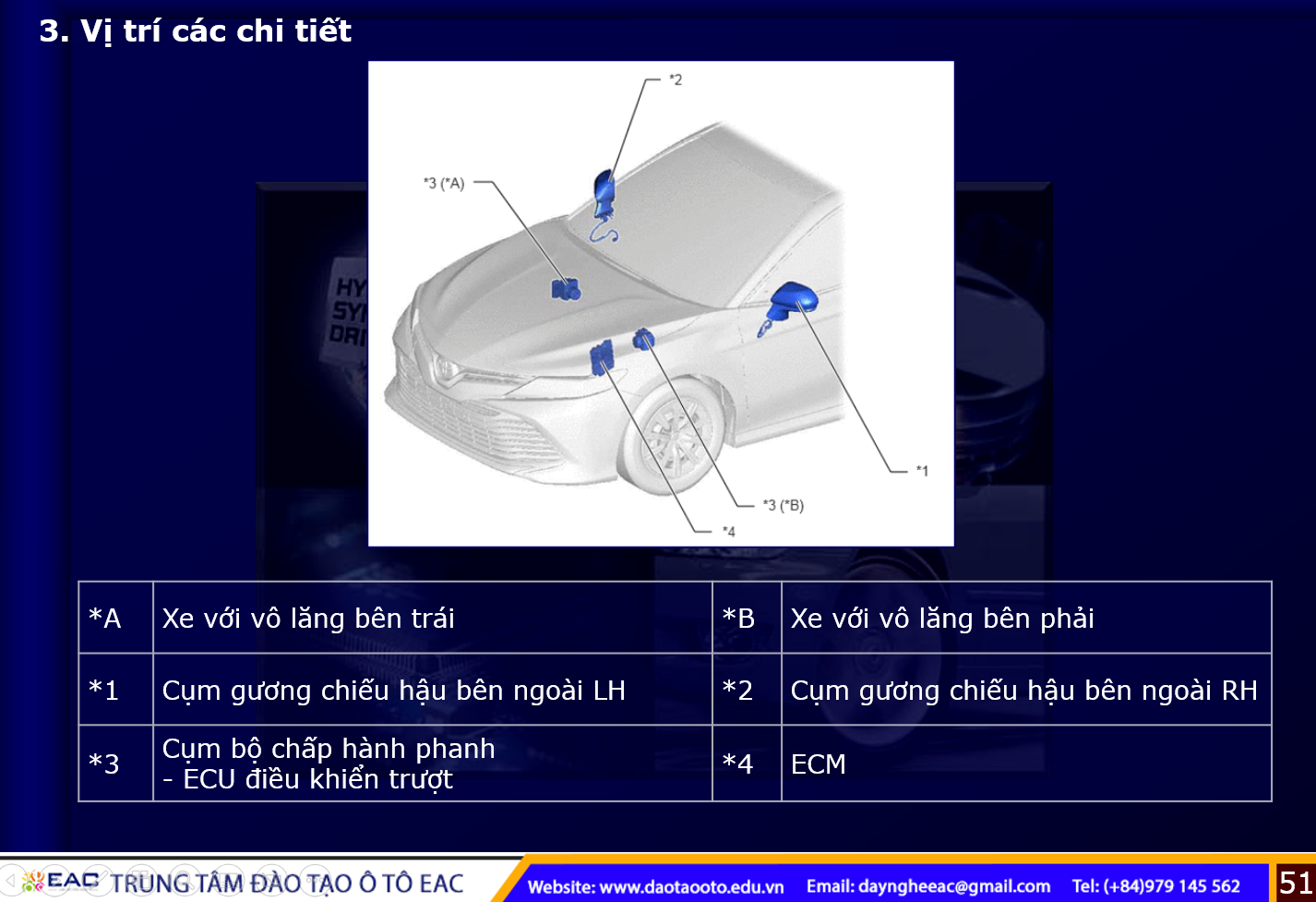
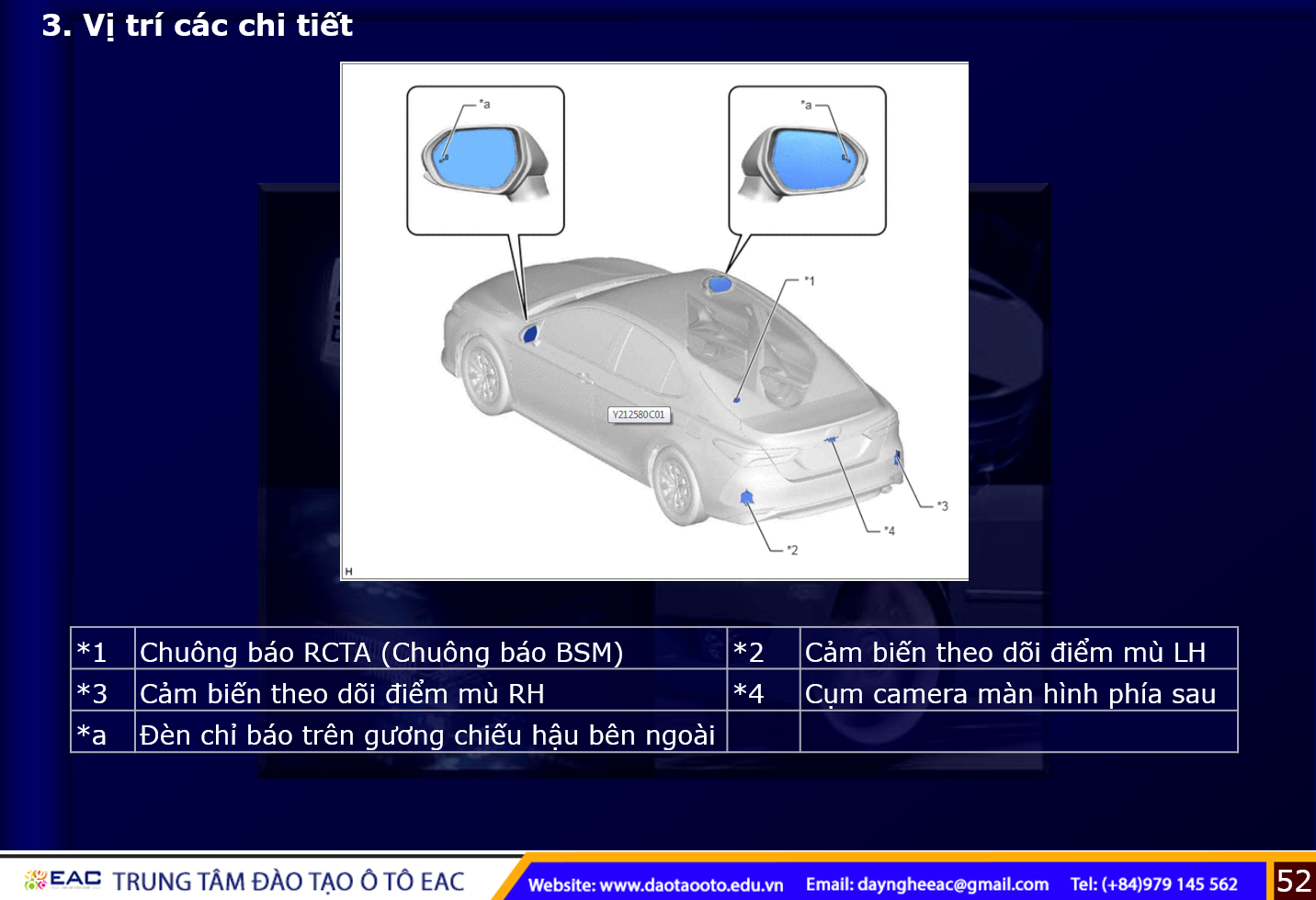
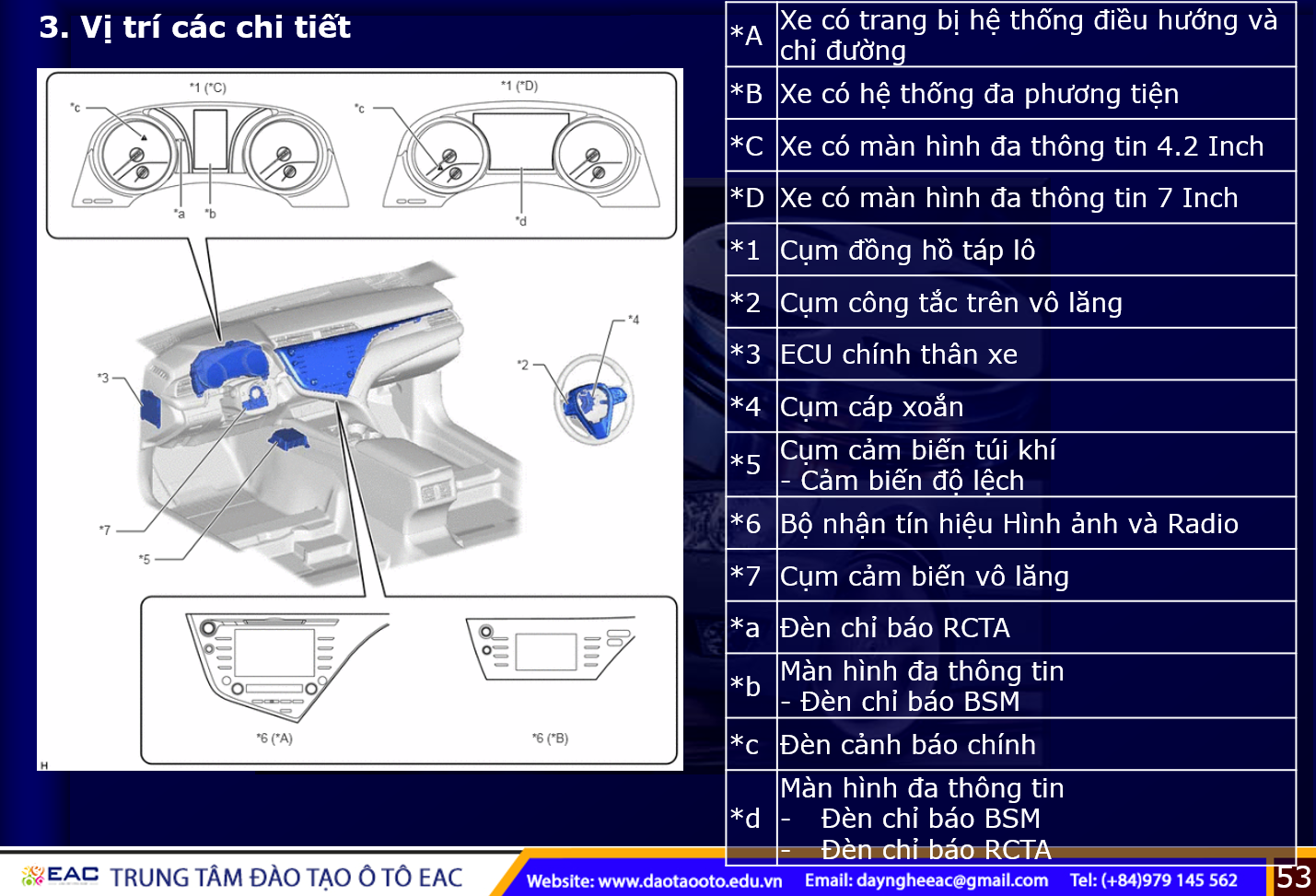
3. Vị trí các chi tiết
4. Nguyễn lý hoạt động
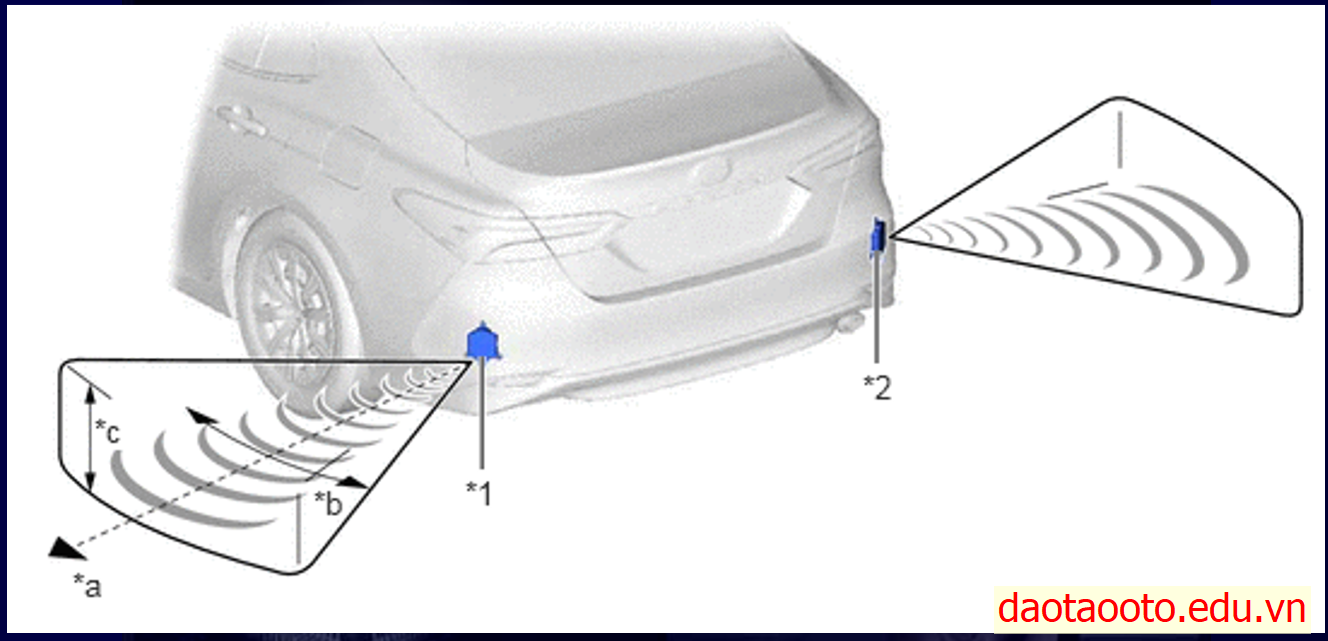
a. Cảm biến theo dõi điểm mù
-Cảm biến theo dõi điểm mù bao gồm một mạch sóng ra-đa millimet và một mạch xử lý tín hiệu.
-Sóng ra-đa millimet sử dụng tần số trong dải 24GHz
|
*1 |
Cảm biến theo dõi điểm mù LH |
*2 |
Cảm biến theo dõi điểm mù RH |
|
*a |
Khoảng cách: Khoảng 70 m |
*b |
Góc ngang: Khoảng 150° |
|
*c |
Góc dọc: Khoảng 20° |
|
|
a. Cảm biến theo dõi điểm mù
Khoảng cách tới vật thể, góc phương vị, và tốc độ tương đối được tính toán từ những thông tin nhận được từ sóng ra đa phản xạ theo mô tả dưới đây
|
Hạng mục |
Phương pháp tính toán |
|
Khoảng cách |
Được tính từ khoảng thời gian tính từ thời điểm sóng ra đa millimet được phát ra cho đến khi mạch sóng ra đa nhận được sóng phản xạ. Khoảng cách này xấp xỉ 70 m. |
|
Góc phương vị |
Được tính toán từ góc nhận được từ sóng ra đa millimet phản xạ về. Góc phát hiện có dải ngang khoảng 150° và dải dọc khoảng 20°. |
|
Tốc độ tương đối |
Được tính toán từ sự thay đổi trong tần số (hiệu ứng Doppler*) của sóng ra đa millimet phản xạ về. |
*: Hiệu ứng Doppler dẫn tới việc sóng radio phát ra từ một vật thể di chuyển mà người quan sát nhận được sẽ có tần số cao hơn khi vật thể di chuyển lại gần và có tần số thấp hơn khi vật thể di chuyển ra xa người quan sát.
b. Chức năng theo dõi điểm mù (Chức năng BSM)
i. Chức năng BSM sẽ hoạt động khi đồng thời thỏa mãn tất cả các điều kiện dưới đây:
-Chức năng BSM bật ON.
-Tốc độ xe từ 16 km/h trở lên.
-Cần số ở vị trí khác R.
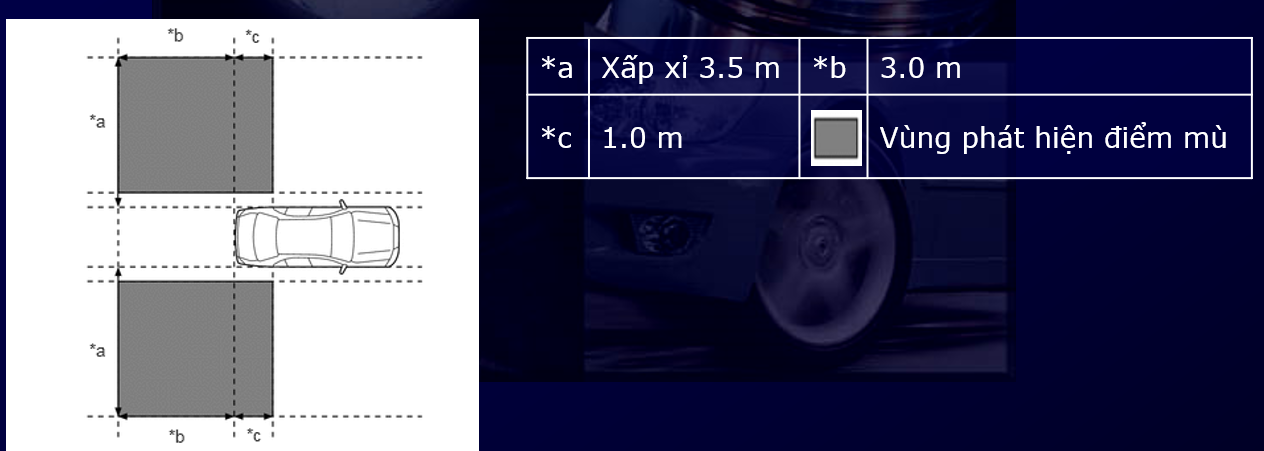
ii. Chức năng BSM có thể phát hiện được xe trong khu vực phát hiện
- Vùng phát hiện điểm mù được hình thành từ các cảm biến theo dõi điểm mù LH và RH được thể hiện như hình minh họa.
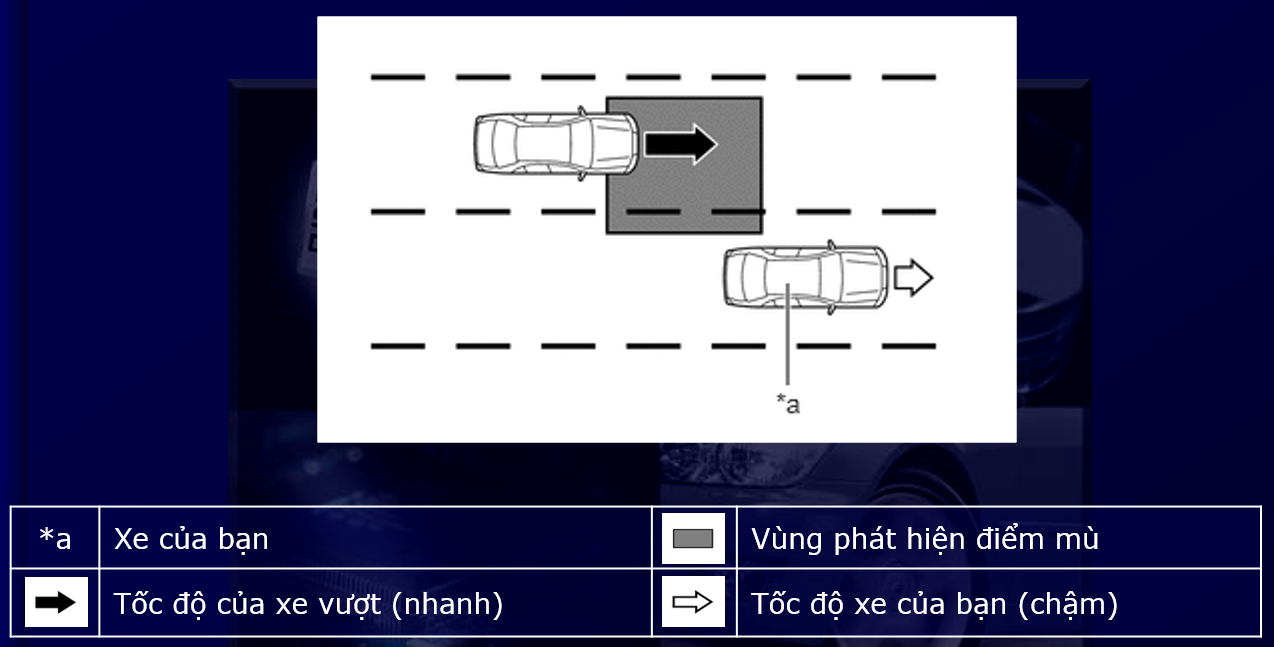
- Khi có xe ở làn bên cạnh vượt lên
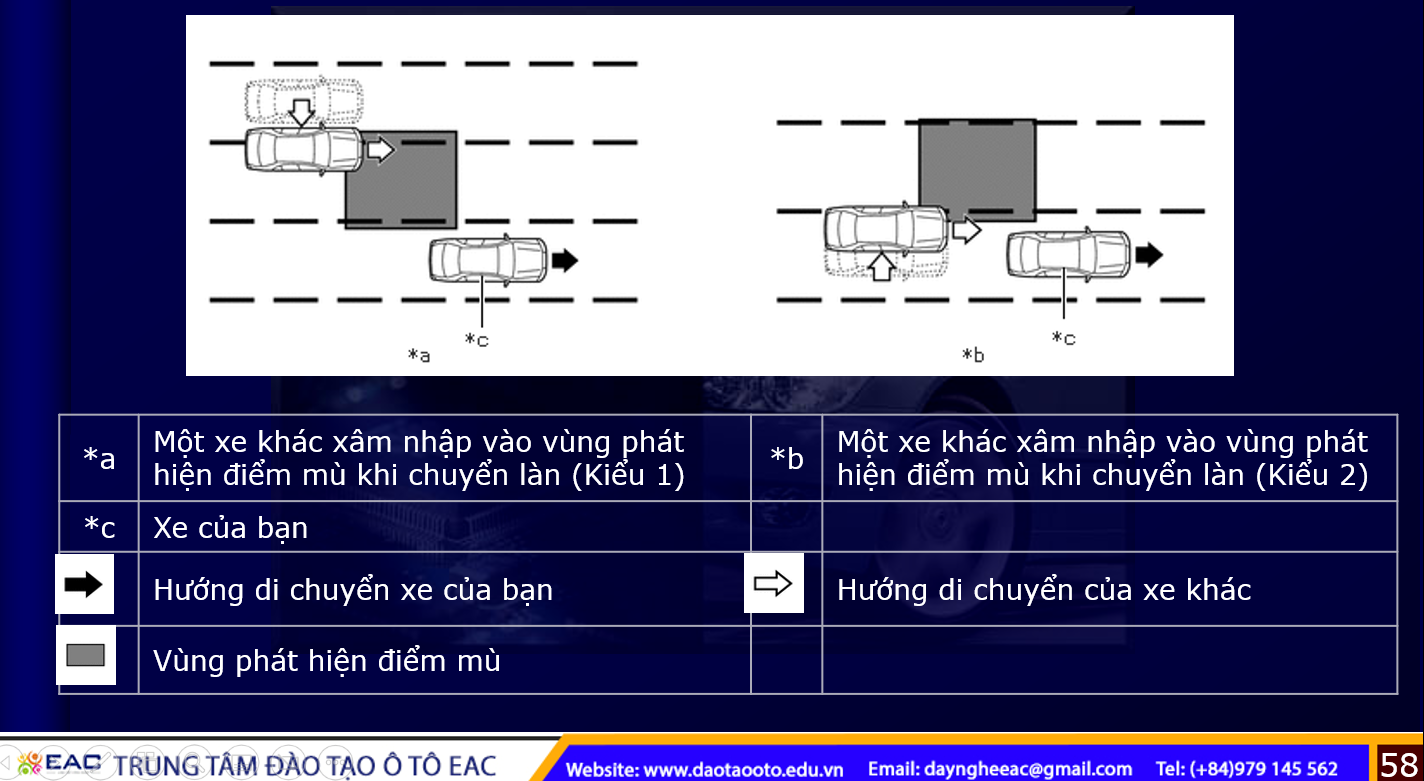
- Khi có xe khác di chuyển vào vùng phát hiện điểm mù của xe bạn do chuyển làn đường:
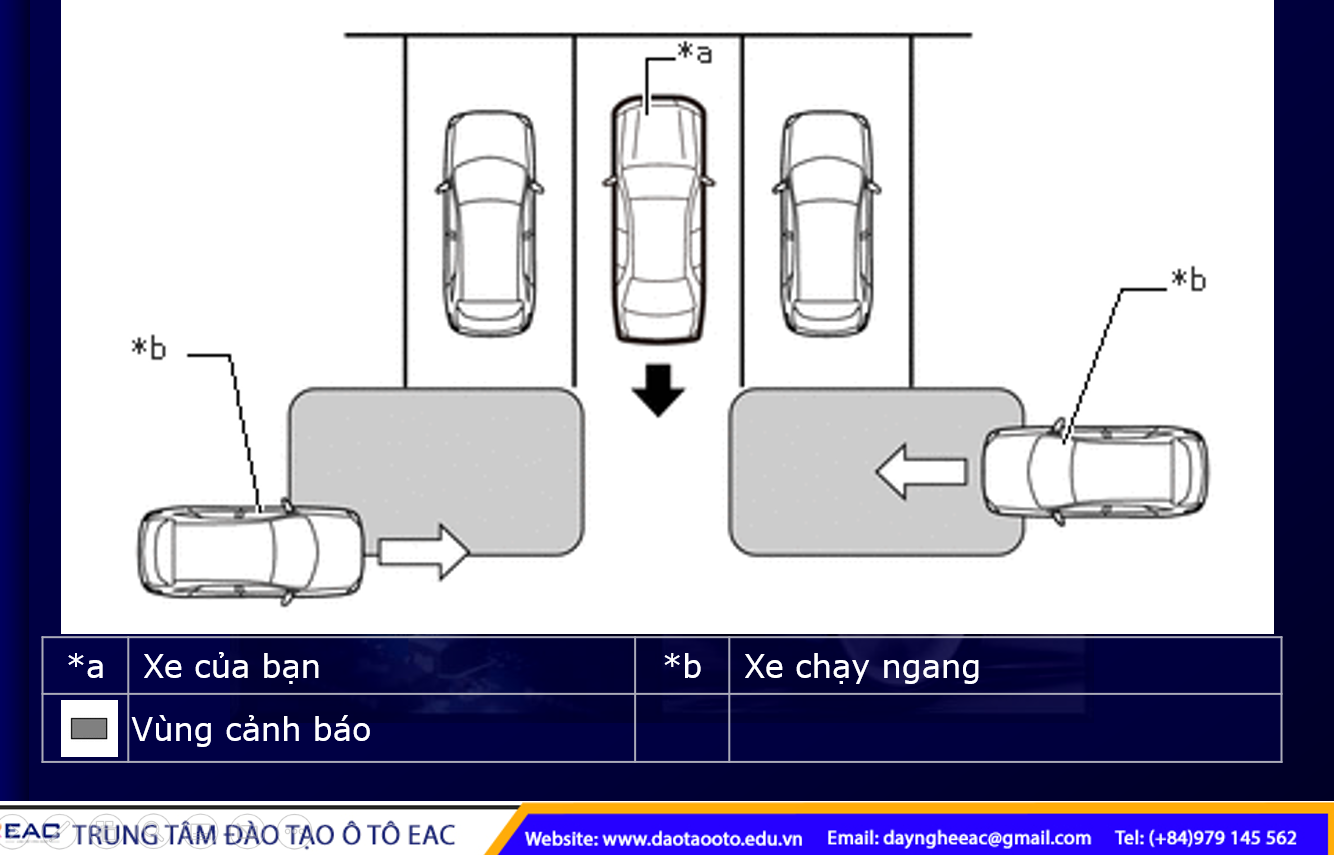
c. Chức năng cảnh báo xe chạy ngang phía sau RCTA
Chức năng RCTA sẽ hoạt động khi đồng thời thỏa mãn tất cả các điều kiện dưới đây:
•Chức năng RCTA bật ON.
•Cần số ở vị trí R.
•Tốc độ xe từ 8 km/h trở xuống.
•Tốc độ của xe chạy ngang từ 8 đến 28 km/h.
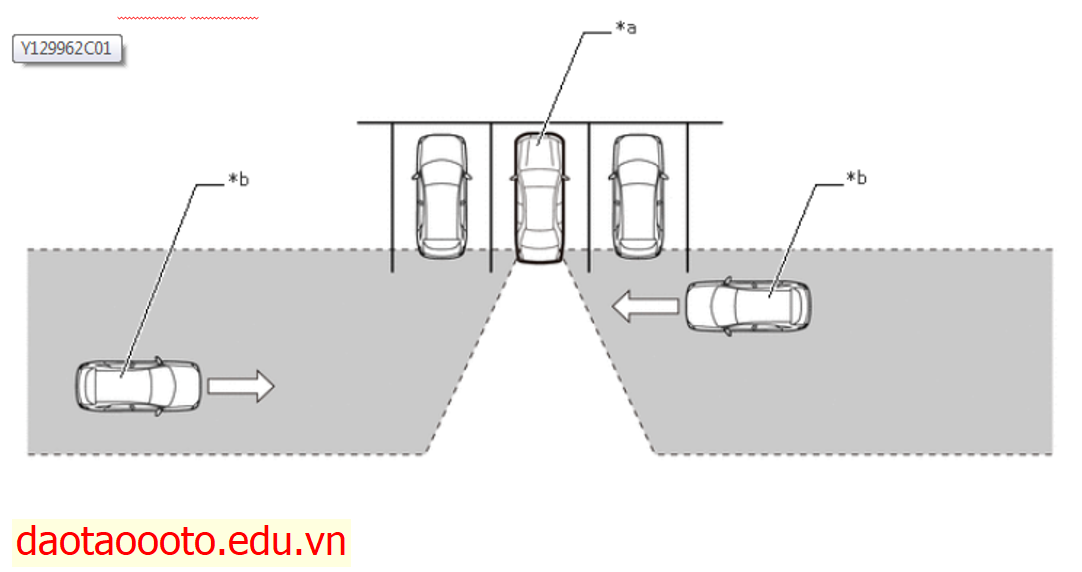
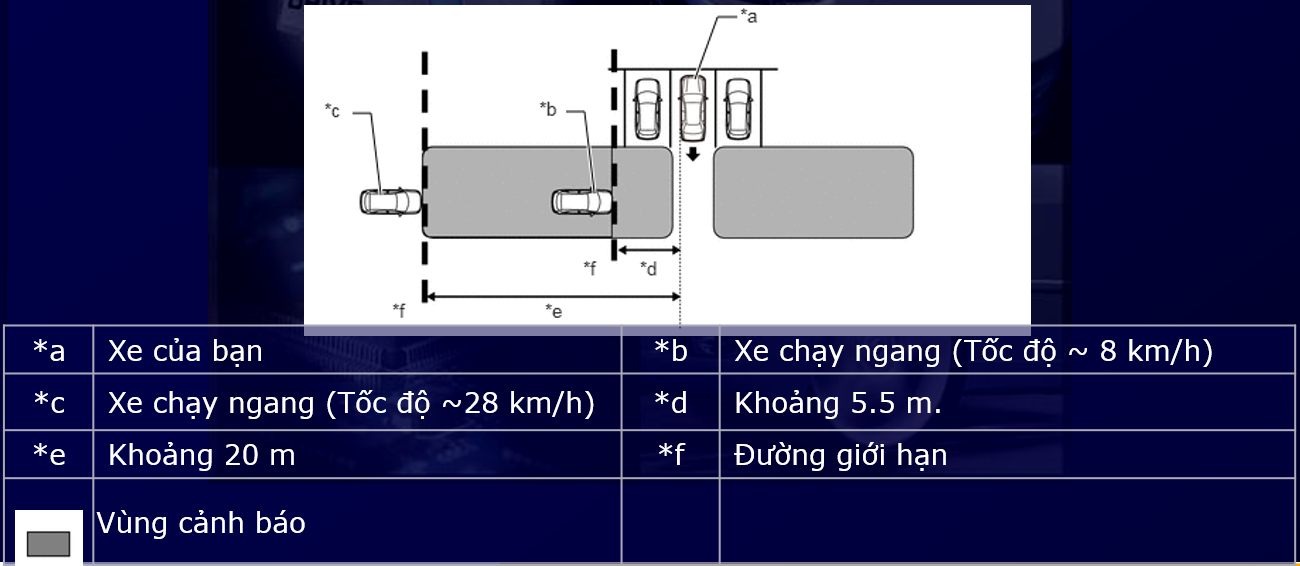
Chức năng RCTA có thể phát hiện xe trong vùng phát hiện của nó:
- Hệ thống liên tục xác định tốc độ tương đối của xe mục tiêu đang tiếp cận và khoảng cách từ xe đó tới xe của bạn. Nếu hệ thống xác định rằng xe mục tiêu có thể chạy ngang qua đường di chuyển của xe của bạn, nó sẽ tính toán thời gian ước lượng từ thời điểm xe này chạy qua đường giới hạn (*f) đến khi chạm đường di chuyển của xe của bạn (ECT). Khi ECT nhỏ hơn hoặc bằng 2.5s, hệ thống cảnh báo người lái bằng cách nháy đèn chỉ báo trên gương chiếu hậu và phát ra âm thanh cảnh báo.
- Khi đỗ xe bình thường
-Tùy thuộc vào trạng thái hoạt động, chức năng RCTA nâng cao việc xác nhận an toàn của người lái bằng cách sử dụng đèn chỉ báo và chuông cảnh báo để báo cho người lái biết rằng có xe khác đang xâm nhập vào vùng cảnh báo của cảm biến theo dõi điểm mù.
-Khi lùi xe, nếu có một xe khác xâm nhập vào vùng phát hiện của cảm biến và được xác nhận là có thể chạy ngang qua, hệ thống sẽ cảnh báo người lái bằng cách nháy đèn chỉ báo trên gương chiếu hậu và phát ra âm thanh cảnh báo
5. Những lưu ý khi sửa chữa hệ thống theo dõi điểm mù
Tham khảo cẩm nang sửa chữa theo đường dẫn sau để biết thêm thông tin chi tiết:
RM\Audio\Visual\Telematics\Park Assist\Monitoring\Blind Spot Monitor Sensor\Adjustment
Mục đích: Ca-lip cảm biến theo dõi điểm mù
Thực hiện khi: Thay thế cảm biến theo dõi điểm mù, hư hỏng trong hệ thống theo dõi điểm mù (đèn BSM trên gương chiếu hậu không sáng, luôn sáng …)
Các bước thực hiện:
1. Chuẩn bị khu vực điều chỉnh
2. Chuẩn bị mục tiêu (vị trí đặt chóa phản xạ)
3. Kiểm tra giá trị hiển thị của cảm biến từ GTS
4. Điều chỉnh trục cảm biến theo dõi điểm mù
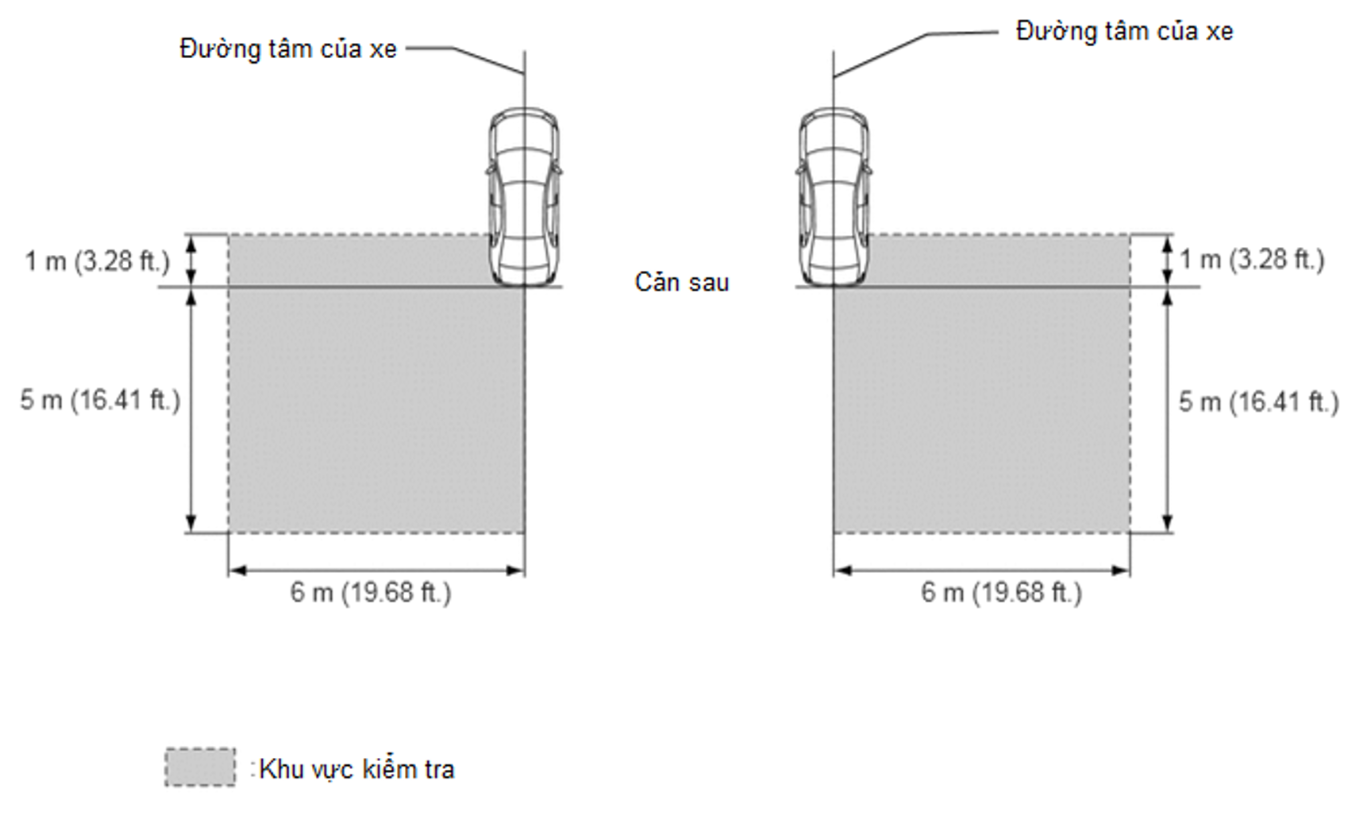
5.1. Chuẩn bị khu vực điều chỉnh
Đưa xe đến mặt phẳng có không gian như hình minh họa
Lưu ý:
-Thực hiện kiểm tra trên mặt phẳng.
-Đảm bảo rằng không có vật kim loại xung quanh xe hoặc trên mặt sàn.
-Bỏ hết hàng hóa, hành lý trên xe trước khi kiểm tra.
-Xác nhận áp suất lốp trong tiêu chuẩn khi kiểm tra.
-Không đặt bất kỳ vật kim loại nào ngoài chóa phản xạ vào hoặc cho phép mọi người vào khu vực kiểm tra như trong hình minh họa (Rộng 6 m x Dài 6 m x Cao 4 m).
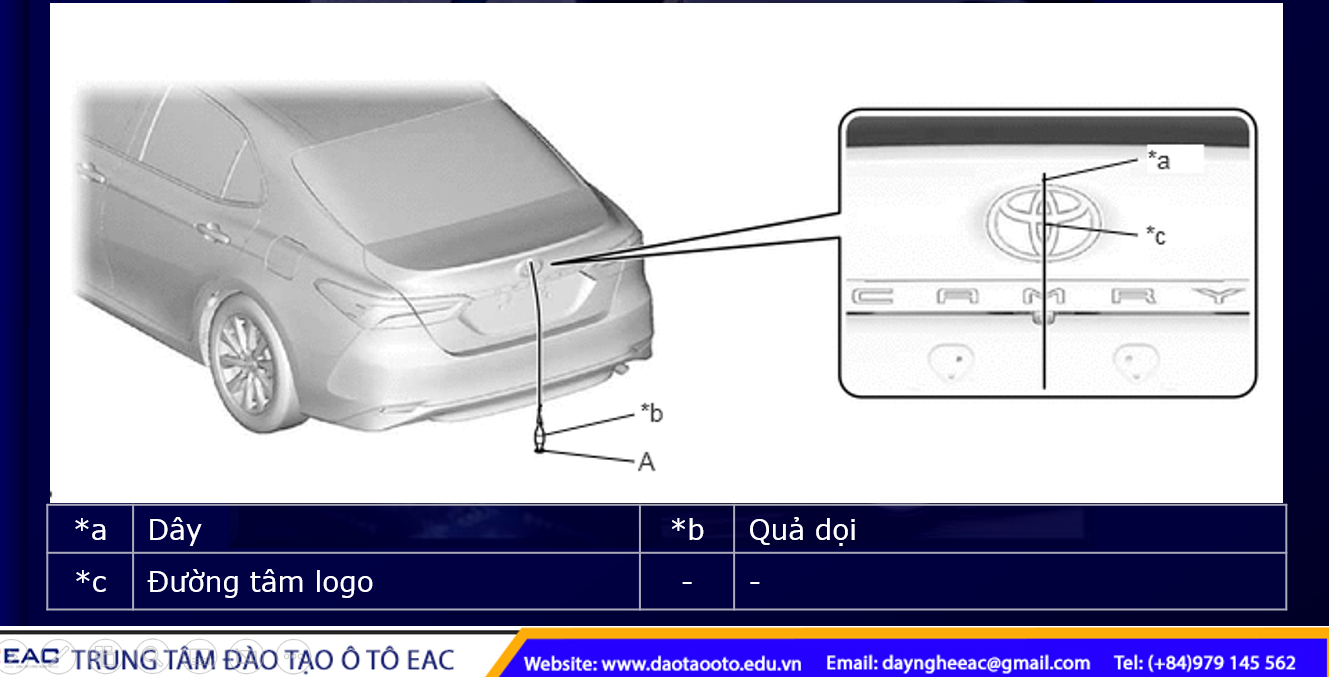
5.2. Xác định vị trí đặt chóa phản xạ
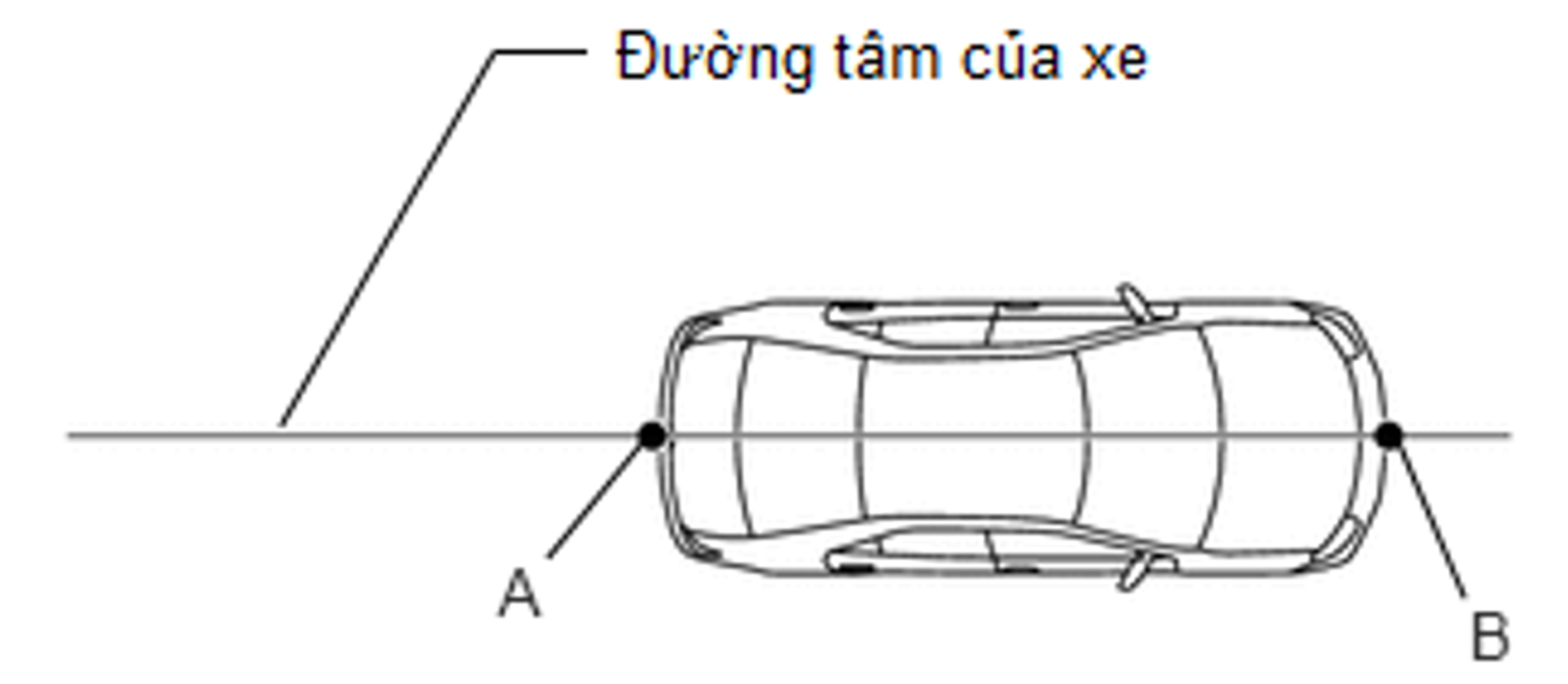
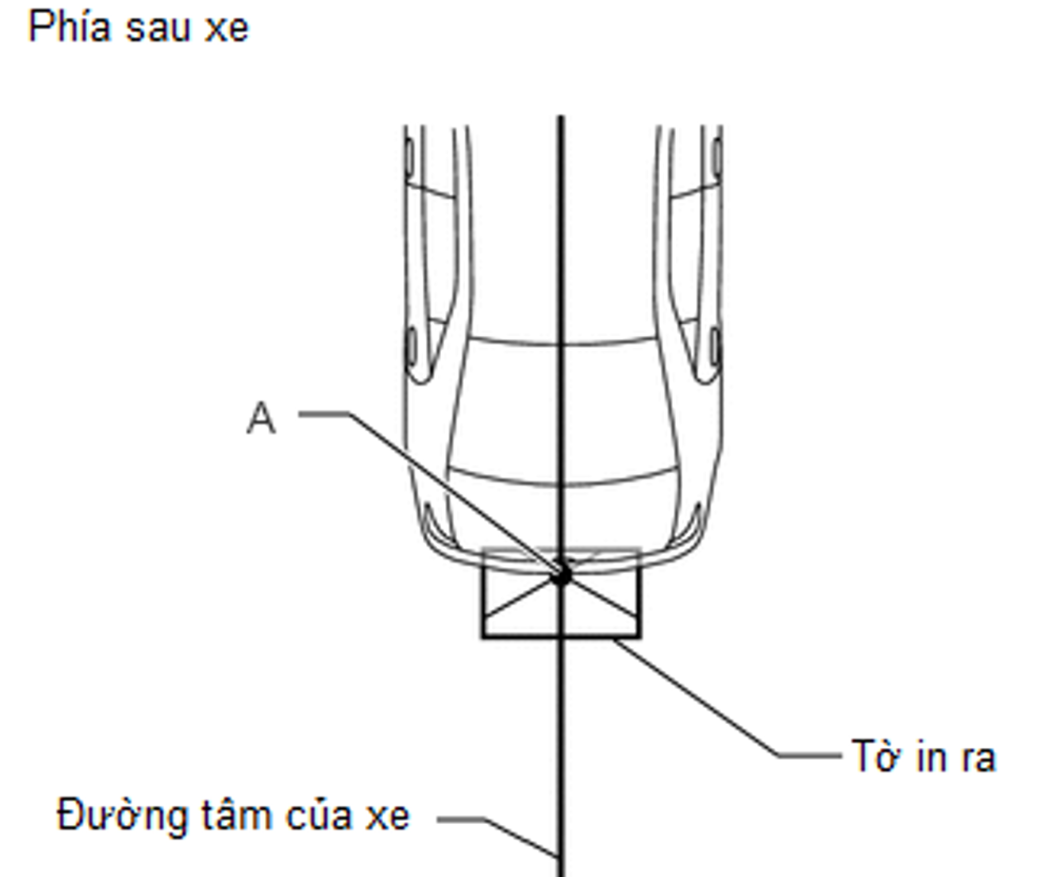
i. Treo quả dọi tại tâm của logo phía sau, đánh dấu điểm tâm phía sau của xe (điểm A) trên mặt sàn.
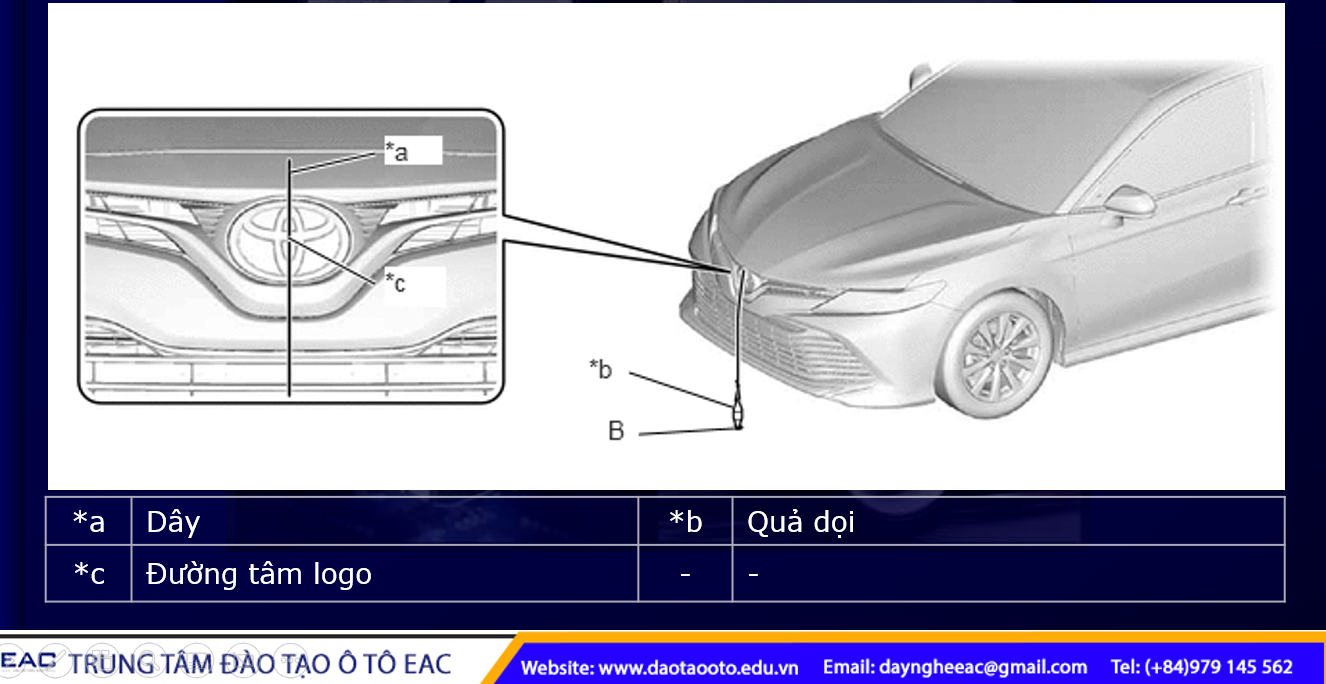
5.2. Xác định vị trí đặt chóa phản xạ
ii. Treo quả dọi tại tâm của logo phía trước trên lưới tản nhiệt, đánh dấu điểm tâm phía trước của xe (điểm B) trên mặt sàn.
5.2. Xác định vị trí đặt chóa phản xạ
iii. Vẽ đường tâm của xe đi qua điểm A và điểm B.
5.2. Xác định vị trí đặt chóa phản xạ
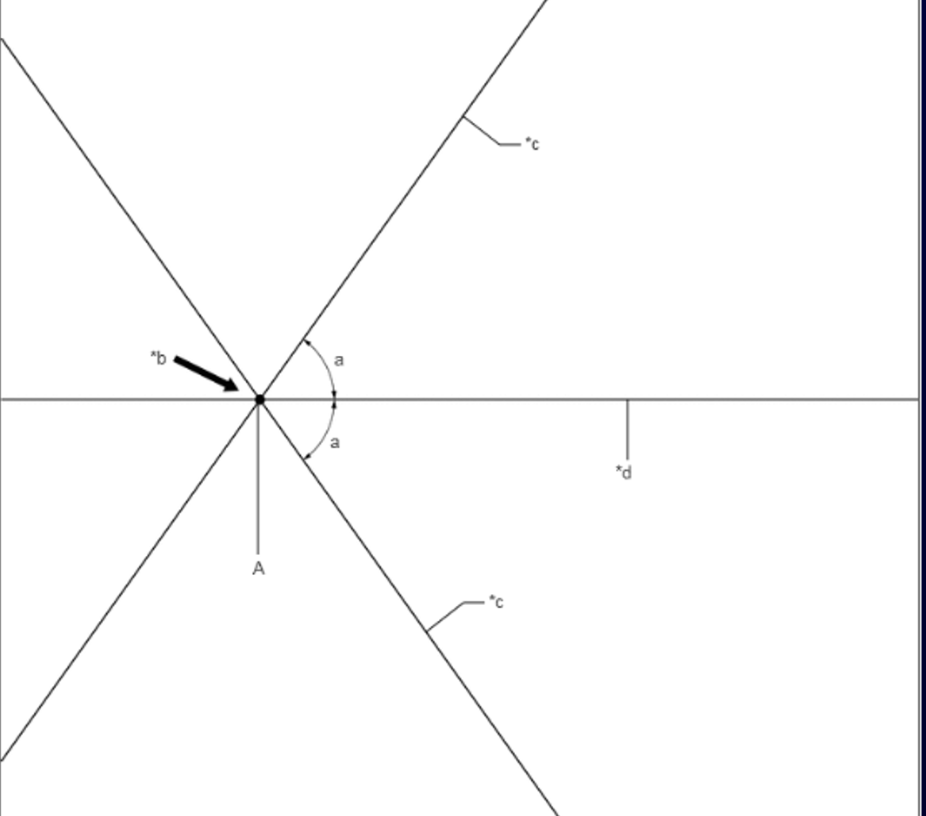
iv. In từ cẩm nang sửa chữa hình xác định vị trí góc đặt chóa
|
*a |
Tờ in ra |
|
*b |
Góc của cản sau |
|
*c |
Đường C |
|
*d |
Đường tâm của xe |
|
a |
Góc 54.5° |
5.2. Xác định vị trí đặt chóa phản xạ
v. Đặt hình vừa in lên sàn sao cho đường tâm của xe và điểm A trùng với hình in ra như minh họa.
5.2. Xác định vị trí đặt chóa phản xạ
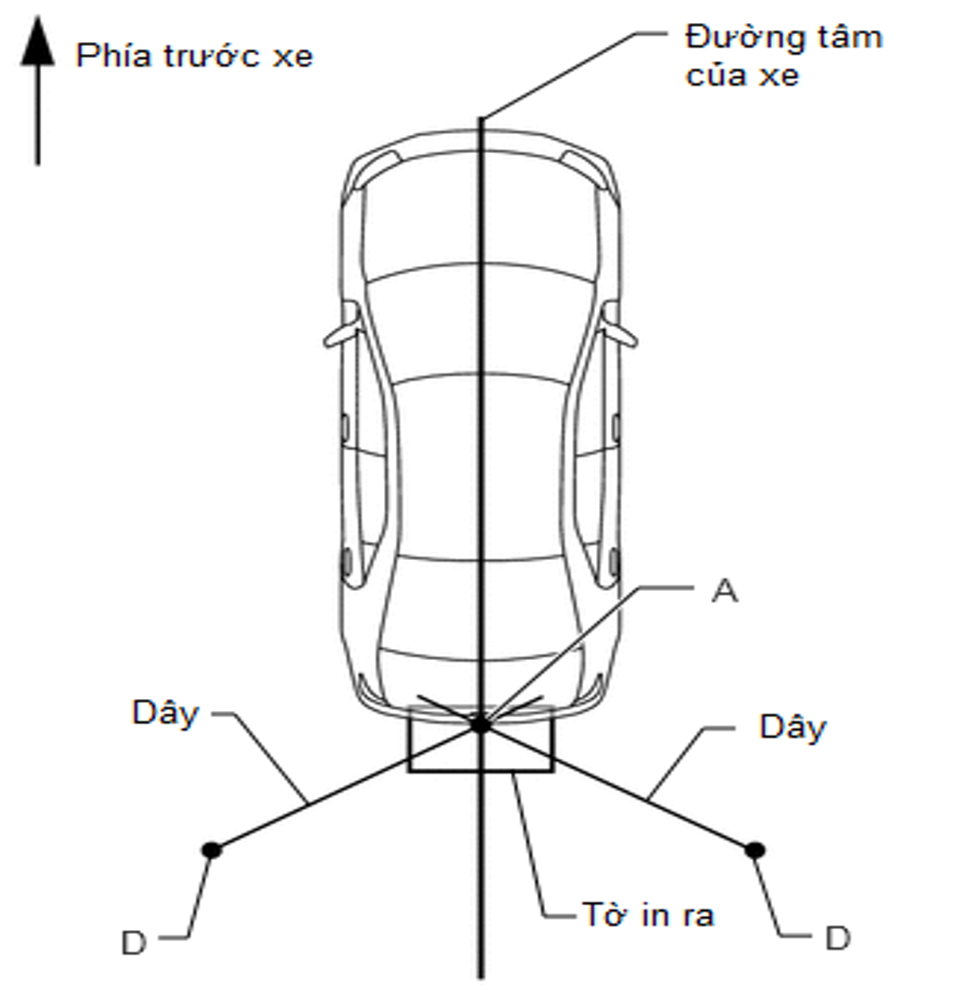
vi. Đặt một đoạn dây trùng với đường C và đánh dấu điểm D cách điểm A 2905 mm.
5.2. Xác định vị trí đặt chóa phản xạ
vii. Đặt chóa phản xạ tại điểm D như hình minh họa bên dưới.
|
*A |
Bên trái của xe |
*B |
Bên phải của xe |
|
*a |
Đường tâm của xe |
*b |
Chóa phản xạ |
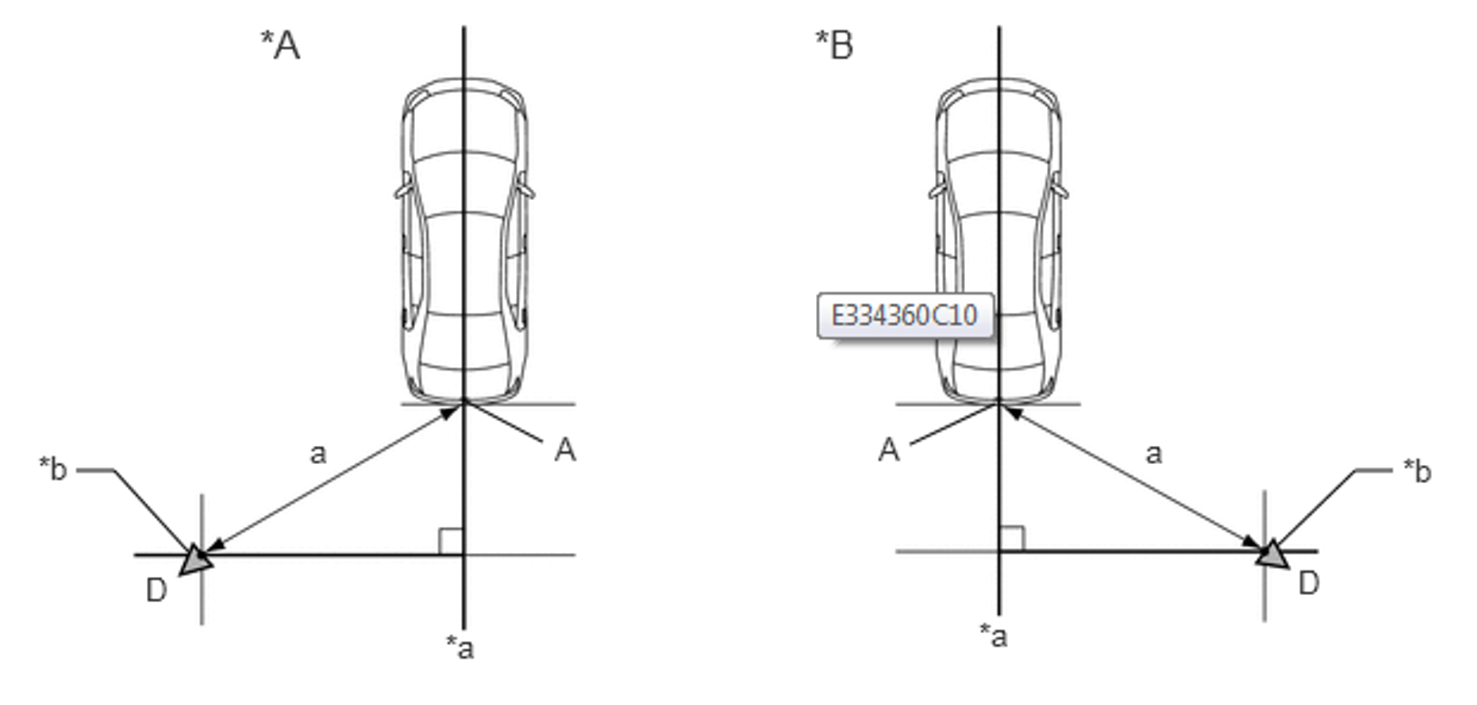
5.2. Xác định vị trí đặt chóa phản xạ
Lưu ý:
-Đặt chóa phản xạ sao cho tâm của nó cách mặt đất là 521 mm.
-Tâm của lăng trụ là điểm tham chiếu cho vị trí và góc thiết lập.
-Đặt chóa phản xạ như hình minh họa sao cho tâm của lăng trụ đối diện với cảm biến theo dõi điểm mù.

5.3. Kiểm tra giá trị hiển thị của cảm biến từ GTS
i.Kết nối GTS với giắc DLC3.
ii.Bật khóa điện ON.
iii.Bật hệ thống theo dõi điểm mù.
iv.Mở GTS.
v.Vào các mục như sau: Body Electrical /Blind Spot Monitor Master hoặc Blind Spot Monitor Slave /Utility /BSM Master Beam Axis Display hoặc BSM Slave Beam Axis Display.
|
Mục |
Cảm biến theo dõi điểm mù bên phải |
Cảm biến theo dõi điểm mù bên trái |
|
Góc tiêu chuẩn |
-3.6° tới +3.6° |
-3.6° tới +3.6° |
5.3. Kiểm tra giá trị hiển thị của cảm biến từ GTS
Gợi ý: Nếu kết quả hiển thị nằm ngoài phạm vi tiêu chuẩn, dưới đây là các nguyên nhân có thể xảy ra. Thực hiện các biện pháp xử lý:
|
Nguyên nhân có thể |
Biện pháp xử lý |
|
Vị trí đặt SST (chóa phản xạ) chưa chính xác |
Kiểm tra vị trí của SST (chóa phản xạ) và kiểm tra không gian và thực hiện lại quy trình |
|
Một vật kim loại nằm gần vùng kiểm tra |
Kiểm tra vị trí của SST (chóa phản xạ) và kiểm tra không gian và thực hiện lại quy trình |
|
Lắp ráp cảm biến theo dõi điểm mù chưa chính xác |
Kiểm tra tình trạng lắp ráp cảm biến theo dõi điểm mù |
5.4. Điều chỉnh trục cảm biến theo dõi điểm mù
i. Vào các mục như sau: Body Electrical / Blind Spot Monitor Master hoặc Blind Spot Monitor Slave / Utility / BSM Master Beam Axis Adjustment hoặc BSM Slave Beam Axis Adjustment.
ii. Kết thúc
Lưu ý: Khi các giá trị trên trục hiển thị nằm trong dải cho phép, việc thực hiện điều chỉnh này bù cho bất kỳ độ lệch nào so với giá trị thông thường.
Trên đây là toàn bộ những hướng dẫn về nguyên lý hoạt động, cấu tạo của hệ thống theo dõi điểm mù BSM, để có được nhiều hơn kiến thức về các hệ thống, cũng như được thực hành trực tiếp trên xe ô tô các bạn tham khảo các khóa học nghề tại trung tâm đào tạo ô tô EAC
1. Học điện ô tô cơ bản
2. Học điện ô tô nâng cao
Share on facebook
- Cùng tìm hiểu về hệ thống phanh đỗ điện Toytoa Camry 2019
- Những lưu ý khi sửa chữa hệ thống phanh đỗ điện ô tô
- Dạy nghề điện ô tô tại TT EAC - Ưu điểm của hệ thống điện khi có rơ le Bài 2
- Hoạt động của khóa học điện ô tô toàn diện EAC
- Cùng tìm hiểu về khóa học nghề ô tô toàn diện tại EAC
- Học viên nói gì về trung tâm học nghề ô tô eac
- B1269 Ngừng liên lạc với ECU chống trộm - Học nghề ô tô EAC




