
Hệ thống kiểm soát lực kéo TCS - Traction Control System
Ngày đăng: 07/10/2025 08:58:52
Lượt xem: 717
Hệ thống kiểm soát lực kéo TCS là một hệ thống an toàn chủ động, thường được tích hợp như một chức năng phụ của hệ thống cân bằng điện tử (ESC), giúp ngăn chặn mất lực kéo bằng cách sử dụng các thành phần chung với ABS (Anti-lock Braking System).
1. Khái niệm và mục đích:
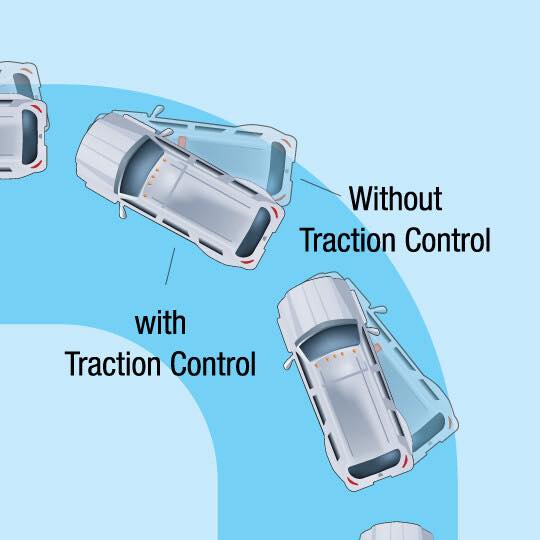
TCS là hệ thống an toàn chủ động được thiết kế để ngăn chặn bánh xe trượt (wheelspin) khi xe tăng tốc, đặc biệt trên bề mặt đường có độ bám thấp như đường ướt, tuyết, cát hoặc sỏi. Mục đích chính là duy trì độ bám tối ưu giữa lốp xe và mặt đường, tránh tình trạng mất kiểm soát xe do một hoặc nhiều bánh xe quay tự do mà không truyền lực kéo hiệu quả. Không giống như ABS (ngăn khóa bánh khi phanh), TCS tập trung vào giai đoạn tăng tốc, giúp phân bổ lực kéo đều hơn và cải thiện khả năng tăng tốc an toàn. Theo dữ liệu từ NHTSA, TCS có thể giảm tỷ lệ tai nạn do mất lực kéo lên đến 20-30% trên đường trơn.
2. Lịch sử:
TCS được phát triển từ những năm 1970 dựa trên công nghệ ABS nhưng phiên bản hiện đại đầu tiên xuất hiện năm 1991 trên xe Mercedes-Benz S-Class. Ban đầu nó được gọi là ASR (Anti-Slip Regulation) bởi Bosch và nhanh chóng trở thành tiêu chuẩn trên các xe cao cấp. Đến những năm 2000, TCS được tích hợp rộng rãi với ESC và từ 2011, nó trở thành bắt buộc trên xe mới ở châu Âu và Mỹ. Sự phát triển tiếp theo bao gồm tích hợp với động cơ điện trên xe hybrid và EV, nơi TCS sử dụng phương pháp điều khiển torque vectoring để tối ưu hóa lực kéo.
3. Cấu tạo:
Cấu trúc của TCS bao gồm các thành phần cảm biến, bộ xử lý trung tâm (ECU), và cơ cấu chấp hành. Hệ thống thường chia sẻ linh kiện với ABS và ESC để giảm chi phí và độ phức tạp. Dưới đây là các thành phần chính:
3.1 Cảm biến tốc độ bánh xe (Wheel Speed Sensors): Đặt tại mỗi bánh xe (thường 4 cảm biến), sử dụng công nghệ hiệu ứng Hall hoặc từ trở magneto-resistive để đo tốc độ quay ω với độ chính xác cao (lên đến 0.1 km/h). Chúng gửi tín hiệu liên tục đến ECU, giúp phát hiện sự chênh lệch tốc độ giữa các bánh.
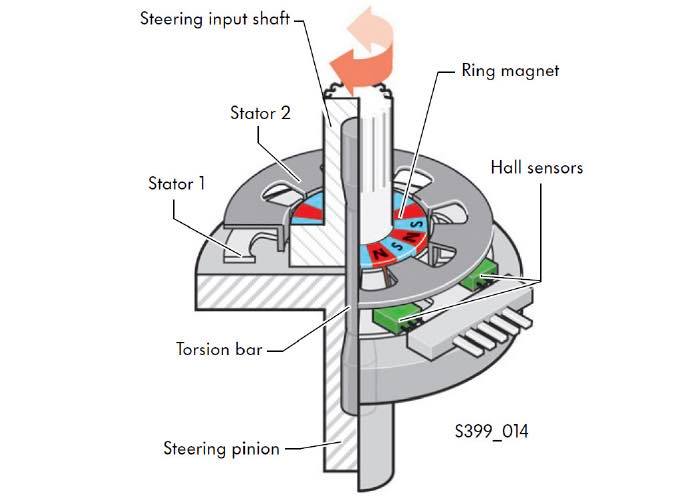
3.2 Cảm biến góc lái (Steering Angle Sensor): Theo dõi góc quay vô lăng để ECU biết ý định của người lái, hỗ trợ phân biệt giữa trượt do tăng tốc và trượt do cua. Các cảm biến này đa số sử dụng hiệu ứng Hall
3.3 Bướm ga điện tử (Electronic Throttle Control - ETC): Điều khiển lượng không khí vào động cơ để giảm mô-men xoắn khi cần. Trên xe điện, thay bằng bộ điều khiển động cơ (Motor Controller).
3.4 Van điều khiển phanh và bộ điều biến thủy lực (Hydraulic Modulator với Solenoid Valves): Bao gồm van solenoid, bơm điện (electric pump) và bình tích áp (accumulator). Chúng cho phép áp lực phanh độc lập lên từng bánh mà không cần người lái đạp phanh.
3.5 ECU (Electronic Control Unit): Đây thường là một module tích hợp với ECU của ABS/ESC. ECU sử dụng một vi xử lý (microcontroller) dựa trên chip như ARM hoặc Infineon TriCore, với bộ nhớ flash để lưu trữ phần mềm điều khiển. Nó xử lý dữ liệu thời gian thực (real-time) từ cảm biến (tần suất 50-100 Hz), chạy các thuật toán để tính toán và ra lệnh can thiệp. ECU kết nối qua mạng CAN (Controller Area Network) với các hệ thống khác như ECU động cơ. Trên một số xe, ECU TCS có thể là riêng biệt nhưng thường tích hợp để giảm trọng lượng (khoảng 0.5-1 kg).
3.6 Các thành phần phụ: Cảm biến gia tốc (accelerometers) để đo gia tốc dọc và đèn báo TCS trên bảng đồng hồ để thông báo khi hệ thống kích hoạt.
Cấu trúc tổng thể là một vòng lặp điều khiển kín (closed-loop control system), nơi dữ liệu từ cảm biến được xử lý tại ECU rồi chuyển lệnh đến cơ cấu chấp hành actuators (phanh hoặc động cơ) sau đó phản hồi lại cảm biến.
4. Nguyên lý:
TCS hoạt động dựa trên nguyên tắc phát hiện và khắc phục độ trượt bánh xe (slip). Quy trình chi tiết như sau:
4.1 Thu thập dữ liệu: Cảm biến tốc độ bánh xe đo ω_w (tốc độ quay bánh) và so sánh với ω_v (tốc độ xe ước tính từ các bánh không dẫn động hoặc cảm biến khác).
4.2 Tính toán độ trượt: ECU sử dụng công thức hệ số trượt slip ratio λ = (ω_v - ω_w) / ω_v (nếu λ > 0 nghĩa là bánh đang trượt; ngưỡng thường 10-20% tùy bề mặt đường). Trên bề mặt trơn, ngưỡng có thể điều chỉnh động bằng thuật toán fuzzy logic.
4.3 Phát hiện và can thiệp:
Nếu λ vượt ngưỡng, ECU kích hoạt:
-Giảm mô-men động cơ: Gửi lệnh đến bướm ga ETC để đóng bướm ga hoặc giảm điện áp bugi (trên xe xăng), hoặc giảm moment (torque) trên xe điện. Thời gian phản hồi dưới 100ms.
-Áp dụng phanh độc lập: Sử dụng van solenoid để bơm áp suất thủy lực (từ accumulator) lên bánh trượt, tạo ma sát để giảm tốc độ quay. Điều này giống ABS nhưng ở chế độ tăng tốc.
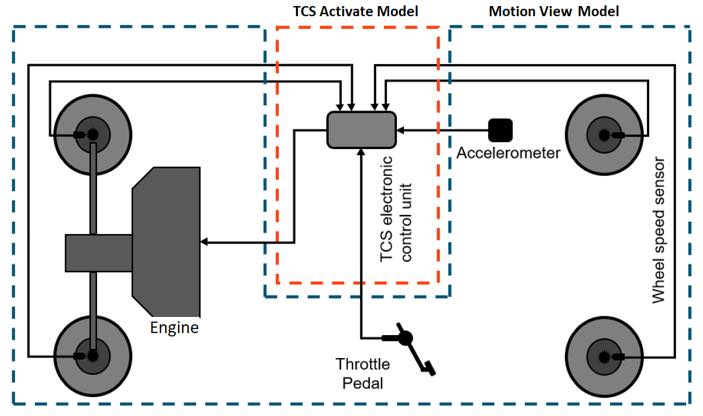
5. Mô tả sơ đồ mạch:
Trong thực tế, sơ đồ bao gồm mạch điện tử: Cảm biến → ADC → ECU → DAC → actuators và mạch thủy lực Bơm → van → xi lanh phanh.
Cảm biến tốc độ bánh xe (4x) --> Cảm biến góc lái-->Cảm biến gia tốc -->ECU (Xử lý, Tính λ, PID algorithm)<--> Mạng CAN (kết nối ECU động cơ) --> Actuators: Van solenoid & Hydraulic Modulator --> Phanh từng bánh (ABS shared)
- Electronic Throttle Control --> Động cơ (giảm torque)
-->Đèn báo TCS & Feedback loop ] <-- Kiểm tra lại độ trượt.
Sơ đồ này thể hiện vòng lặp: Dữ liệu vào ECU qua bus tín hiệu (analog/digital), ECU xử lý và xuất lệnh PWM (Pulse Width Modulation) đến van solenoid hoặc bướm ga ETC.
6. Lợi ích:
-Tăng an toàn: Giảm nguy cơ mất lái trên đường ướt hoặc tuyết, đặc biệt ở xe dẫn động cầu trước/sau.
-Cải thiện hiệu suất: Giảm mòn lốp và nhiên liệu lãng phí do trượt bánh.
-Hỗ trợ người lái: Tự động can thiệp mà không cần kỹ năng cao, hữu ích cho xe thể thao hoặc SUV.
7. Hạn chế:
-Tăng chi phí: Khoảng 500-1000 USD cho hệ thống đầy đủ, do thêm ECU và cảm biến phức tạp.
-Không hiệu quả ở off-road: Có thể can thiệp không mong muốn khi bánh cần trượt để thoát lầy, vì vậy nhiều xe có nút tắt TCS.
-Phụ thuộc vào cảm biến: Nếu cảm biến bẩn hoặc hỏng, hệ thống có thể tắt hoặc báo lỗi (mã P0500).
8. Ứng dụng thực tế:
-Leo dốc trơn: TCS phân bổ lực kéo để tránh bánh trước/sau trượt, như trên Toyota Land Cruiser ở địa hình đồi núi.
-Tăng tốc trên đường ướt: Ví dụ, trên xe Mercedes-Benz, TCS kết hợp với 4MATIC (AWD) để duy trì ổn định ở tốc độ cao.
-Trong xe đua: TCS nâng cao (như trên Ferrari) sử dụng torque vectoring để cải thiện thời gian vòng đua.
Share on facebookTin tức khác




